











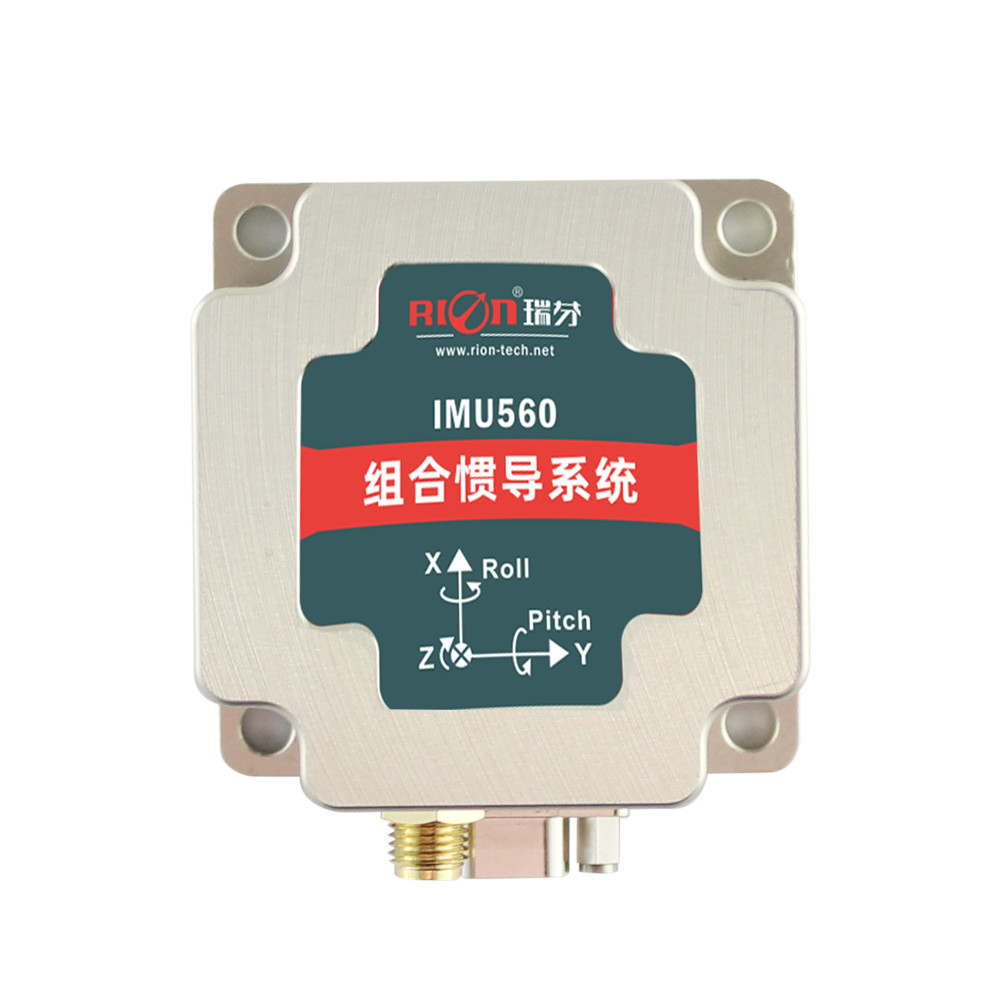



De acordo com a ordem da rotação de Z-Y-X, quando o sentido positivo da X-linha central é dirigido à parte dianteira do portador, o ângulo da rotação em torno da Z-linha central é o ângulo de direção, o ângulo da rotação em torno da Y-linha central é o ângulo de passo, e o ângulo da rotação em torno da X-linha central é o ângulo do rolo.
